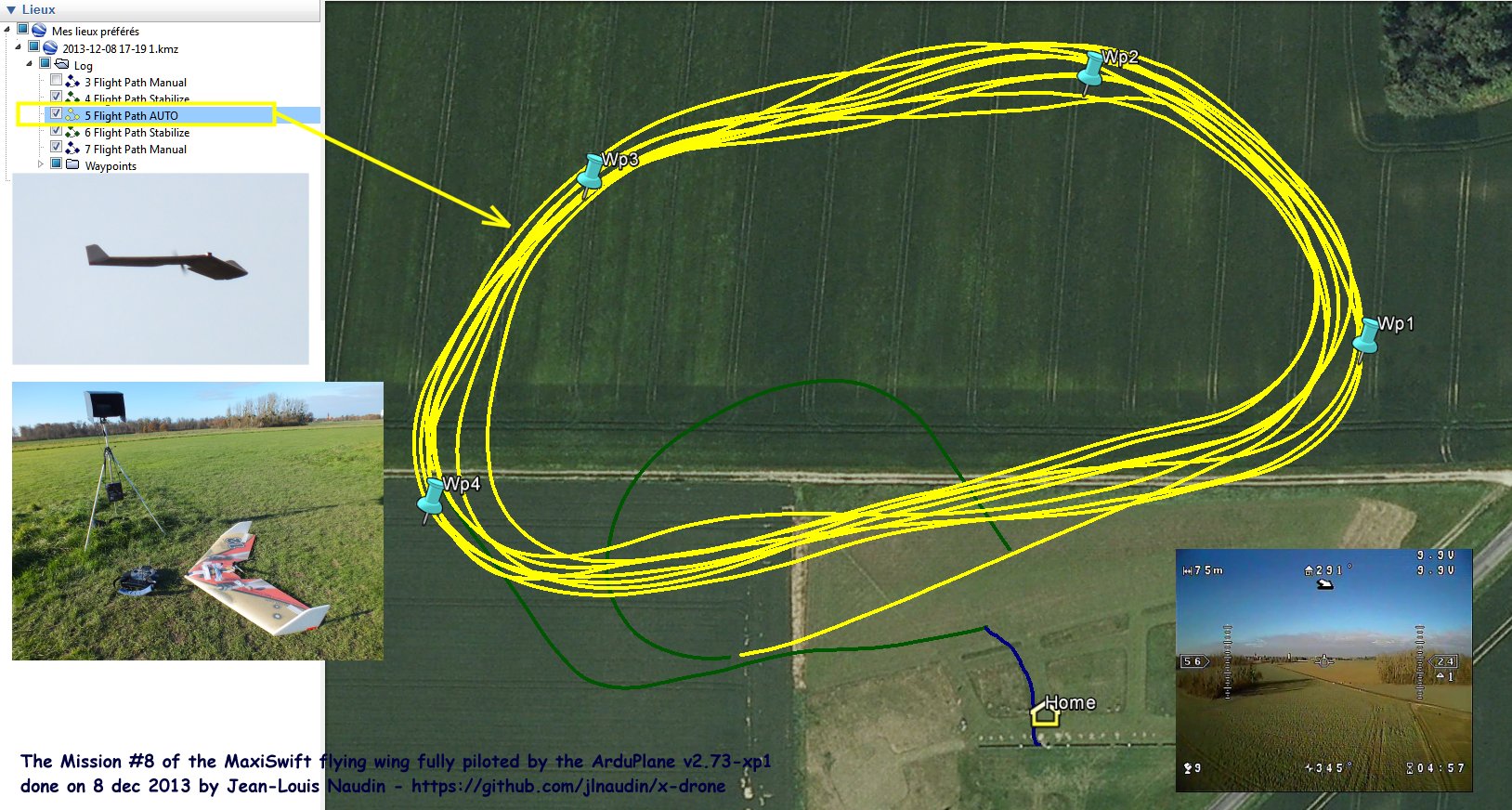
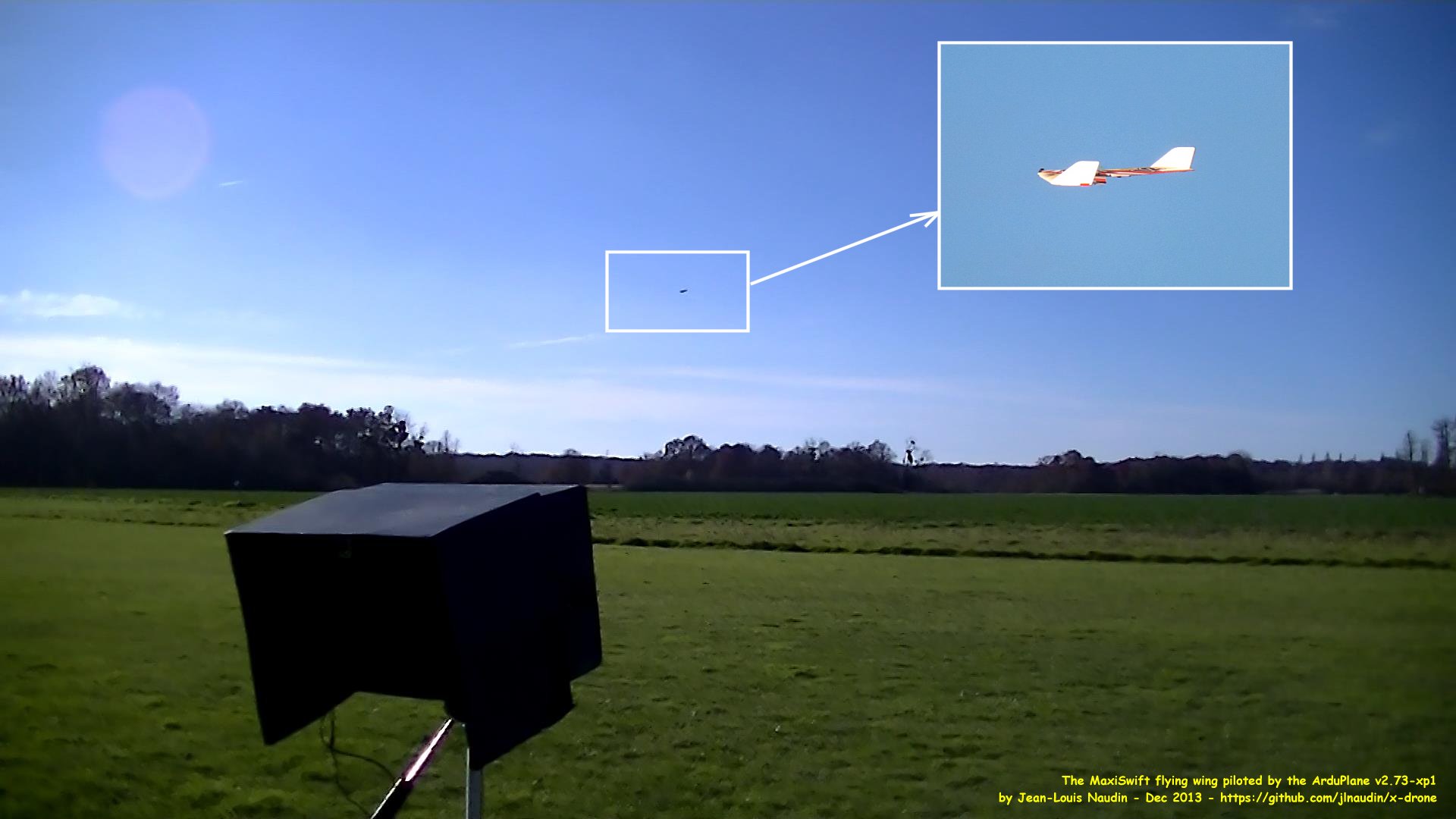
The MaxiSwift flying wing has donne successfully a low altitude flight autonomous mission (< 30m AGL) under flight plan piloted by the ArduPlane v2.73-xp1. A color camera onboard with an OSD display in real time the video of the flight and the data on the ground station screen. (Wind 7 km/h, gusting 15 km/h)
- Avionic setup:
- ArduFlyer v2.5.2 (RCtimer)
- firmware ARduPlane v2.73-xp1 (JLN version)
- GPS: Crius CN-06 V2 (Ublox NEO6M) updated by JLN
- Airspeed sensor MXV7002DP
- OSD Rembizi
- 5.8 Ghz Video transmitter
- CCD color camera for FVP
- Receiver: Multiplex RX-7 M-link
- Transmitter: Multiplex Royal EVO9 M-link 2.4 Ghz
- Lipo 3S 2650 mAh Turnigy
- Brushless motors Spitz 15 #85570/200 Watts 1130KV
- propeller 10x7 APC-E
- ESC 40A for the motor
- Take Off Weight (TOW): 1240 g
- Flight time: about 15 min
Below some photos:

Full mission photos and data at:
More infos at:
https://github.com/jlnaudin/x-drone
http://diydrones.com/profile/JeanLouisNaudin
Comments
Thank you Jean-Louis for all that useful information. Regarding your connection diagram of 9 December 2013, I assume that the jumper JP1 is in place so as to power the board from the ESC BEC. Can you confirm this?
What a great news!
With Arduplane and/ or Thermopilot , can you control the 4 parts of the wing (spans and airbrakes)
- during thermal phase to optimize the curvature of the wing?
- during the landing phase to have a croco mode (flaps up + airbrakes down + an elevator compensation )?
Thanks a lot
FYI: the ArduPlane v2.73-xp1 and the ThermoPilot v7.x have already been successfully tested on various models:
Best Regards
Jean-Louis
Dear Jean-Marie Prigent,
Thanks for your comments and for your tests feedback.
1) The absolute Alt is check when I use the HIL mode with XPlane becaus I am using the MSL altitude. This is helpfull because this allow to start at a random altitude for the test and do the test fligh at the QNH (MSL ref) and not the the QFE (AGL above the home airfield). The TP_AGL_REF is the MSL altitude of your airfield. So, if it is different from zero, you may start at random altitude above the ground with Xplane.
2) The TP_MSL_REF is usefull when I do cross country flight testing in high mountains with a glider because the altitude of the launch point can differ from the landing point. This parameter is used in the ThermoPilot (addon) firmware. And it enable/disable the QNH type navigation.
3) All the basic mode of Arduplane can be used (such as: FBWA,FBWB...etc)
The current version of my firmware v2.73-xp1 fly very well in high wind and I can confirm you that the fly in the HIL simulation on Xplane is very similar to the real flight...
Below the video comparison (HIL Vs REAL) of the same flight under FPL:
Real Flight Vs HIL simulation flight path comparison with the same FPL
I wish you to enjoy flying with ArduPlane 2.73-xp1.
Best Regards
Jean-Louis
Here a video of my test.
I'm in auto mode (FPL flight plan) - fbw min: 35 / max 65 -
I m not moving my controller - it's a big storm only I've simulated with X plane 10 europe edition. (40 to 60 km/h wind)
https://www.icloud.com/iphoto/projects/fr-fr/#2;CAEQARoQWMoqQqUFOcB...
Hi Jean Louis,
Your work is absolutely enormous ! I'm very happy to see people like you that really want to make things better and better.
I've try your Ardupilot 2.73xp under Xplane 10 - Europe Edition.
My config is Ardupilot 2.5/gps uBlock/airspeed/3DR power brick/minimosd from 3DR.
(I ve disabled onboard compass because it mad me crazy!)
I'm using the last mission planner version (1.2.92) because I've not found the old one you ask (1.2.88)
Wonderfrul: You re CH7_OPTION / FPL in flight is really really "incredible" !
Under x-plane it seems to be really stable in gusty condition.
I ve tested with Arduplane 2.76 - HIL version - same weather condition and is not stable. Moreover, very often it crash or in stabilize/FBWB: making yo-yo / wobble with wind! This is increasing - more and more and crash !
So your 2.73xp version seems to be more accurate.
I'm in Brittany and there is always wind (15km to 35 km/h) . So because I want to fly, I want a good version especially for this.
I've few question comments:
1/ In FPL in flight mode, "Absolute alt" is "check" when I read Waypoint. Is it really your choice or a bug ?
Do I need to change something about my config :I see you add: TP_AGL_REF = 'ground altitude in meters MSL' ?
2/ In your Arduino sketch (APM_config Colmato.h) there is only 3 mode : manuel / stab / auto
Have you choose to not use the other mode (fbwa,...) OR these mode doesn t exit in your code ?
Again Wonderful job Jean Louis !
ps: i m ready to test your other file if you want (I've a Caipirinha, SSS 2000 and FX61 not yet used but nearly ready)
Thanks Gagarien for your comments,
Best Regards,
Jean-Louis
Very well done Jean-Louis really impressive and your GitHub repository is really neat.
Here an interesting test with the real MaxiSwift flying wing and the virtual model developped for the HIL simulation on X-Plane with the Mission Planner.
The purpose of this test is to compare their flight performances during an autonomous flight of the real model and of the simulated model in HIL mode with the same Flight plan (FPL) and under the same wind conditions.
The flight path recorded during the REAL FLIGHT mission 35
The same weather conditions have been replicated in HIL mode with the same FPL, here the recorded flight path with X-Plane during the HIL SIMULATION mission 35
More infos about the mission #35 at:
Best Regards
Jean-Louis
The full details of the mission #28 done on Dec 15, 2013 have been posted at:
Best Regards,
Jean-Louis
-
1
-
2
-
3
of 3 Next